The Westinghouse Solution
Westinghouse provides remote robotic cavity cleaning services to reduce personnel radiation exposure and risks, human performance errors, source term and critical path schedule.
The goal of cavity cleaning services is to reduce outage costs. Cavity cleaning services reduce contamination levels by fifty percent (50%) to eighty percent (80%), thereby reducing personnel exposure and decontamination time post cavity drain down. Westinghouse is a total solutions provider with a proven record of accomplishment. We are market leaders in the development of remotely operated inspection, surface preparation, cleaning and retrieval technology for Nuclear Steam Supply System components.
Customer Benefits
- Reduces personnel radiation exposure.
- Reduces personnel risk, by utilizing automated solutions.
- Reduces foreign material intrusion.
- Reduces schedule.
- Reduces outage costs.

1. Multi-Surface Cleaner
Capabilities
- Remote robotic cavity cleaning system.
- Cleans in parallel with refueling activities, with no impact to critical path schedule.
- Cleans open surfaces as well as constrained and recessed areas.
- Mechanical agitation and vacuuming.
- Color camera and lighting.
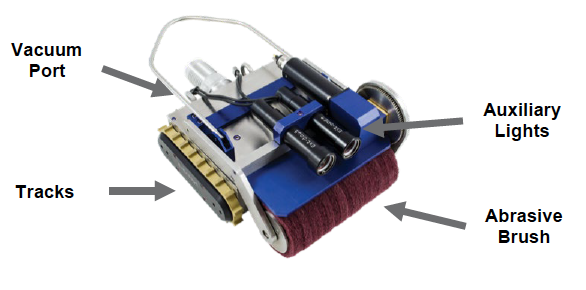
2. Wide Brush Crawler
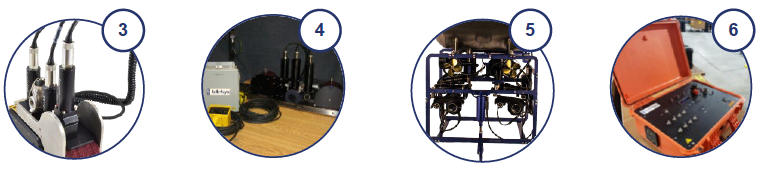
Other Components
Service Overview
Westinghouse has created an innovative remote robotic cavity cleaning solution for PWRs (Pressurized Water Reactors), built to improve safety, speed, and effectiveness of plant cleaning protocols at a reduced cost.
Westinghouse has decades of reliable cavity cleaning experience at nuclear stations, including Braidwood, Salem, Millstone, South Texas Project, Watts Bar, Byron, Calvert Cliffs, Fort Calhoun, and many more.
Westinghouse Remote Robotic Cavity Cleaning System is designed to clean in parallel with refueling activities, with no impact to critical path schedule. The system cleans open surfaces as well as constrained and recessed areas utilizing robotic crawlers and mechanical agitation.
This product suite services all major areas of the cavity, including Upper and Lower Cavity Floors, Upper and Lower Cavity Walls, the Fuel Transfer Canal, The Fuel Travel Path, the Reactor Flange, and O-Ring Groove.
1: The Multi-Surface Cleaner is an adjustable buoyance remotely operated vehicle that delivers a wide brush crawler. The system is designed to scrub and vacuum radioactive contamination from vertical surfaces. The system is connected to a site provided filtration system to remove radioactive contamination.
2: The Wide Brush Crawler is a tracked remotely operated vehicle outfitted with a ventral vacuum port and an abrasive pad brush [continued]
The abrasive pad brush was selected over a wire brush to reduce the risk of foreign object intrusion. The crawler is designed to scrub and vacuum radioactive contamination from horizontal surfaces in large open areas. The crawler is connected to a site provided filtration system to remove radioactive contamination and foreign objects.
3: The Narrow Brush Crawler is a tracked remotely operated vehicle outfitted with vacuum port and an abrasive pad brush. The crawler is designed to scrub and vacuum radioactive contamination from horizontal surfaces in constrained areas and outer bellows floor. The crawler is connected to a vacuum filtration system to remove radioactive contamination and foreign objects.
4: The O-Ring Groove Cleaning System is designed to polish the O-Ring groove just prior to the reactor head set with two pods that use rotating stacks of abrasive pads. The unit is configured in an arc to conform to the curvature of the flange, with the pods on both ends and an equipment drive mechanism in the center.
5: The Submersible is an adjustable buoyance remotely operated vehicle designed to delivery cleaning crawlers; provide video overview, inspection support, and foreign object retrieval.
6: The Control Console is a modular system designed to control all the individual cavity cleaning system components, provide character generation for video overlay, capture digital images, and record service video.

